Next: Lorentz Transformation Up: Theoretical Basis of Special Previous: Clock Error
Consider two inertial frames of reference,  and
and  . Let frame move at velocity
. Let frame move at velocity  with respect to
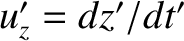
frame . Let us set up right-handed Cartesian coordinate systems in both frames. Suppose that the coordinate systems are
in the so-called standard configuration in which the corresponding coordinate axes are parallel, the
with respect to
frame . Let us set up right-handed Cartesian coordinate systems in both frames. Suppose that the coordinate systems are
in the so-called standard configuration in which the corresponding coordinate axes are parallel, the  -axis in each system is
parallel to , and the origins of the systems coincide at time
-axis in each system is
parallel to , and the origins of the systems coincide at time  . See Figure 3.9. Consider an instantaneous `event' with a definite
spatial location, such as the flashing of a light-bulb. Suppose that the event occurs at time
. See Figure 3.9. Consider an instantaneous `event' with a definite
spatial location, such as the flashing of a light-bulb. Suppose that the event occurs at time  and has displacement (,
and has displacement (,  ,
,  ) in frame . Suppose that the event occurs at time
) in frame . Suppose that the event occurs at time  and has displacement (
and has displacement ( ,
,  ,
,  ) in frame . What is the relationship between (, , , ) and (, , , ). Well, according to standard Newtonian
physics, the “common sense” relationship between the two sets of coordinates is
) in frame . What is the relationship between (, , , ) and (, , , ). Well, according to standard Newtonian
physics, the “common sense” relationship between the two sets of coordinates is
are  ,
,  , and
, and  . The Cartesian components of the instantaneous velocity of our
event in are
. The Cartesian components of the instantaneous velocity of our
event in are  ,
,  ,
,  , whereas the corresponding components in
are
, whereas the corresponding components in
are
 ,
,
 ,
,
 . Hence, we can derive the following Galilean velocity
transformation from Equations (3.88)–(3.91):
. Hence, we can derive the following Galilean velocity
transformation from Equations (3.88)–(3.91):
 |
 |
(3.92) |
 |
 |
(3.93) |
 |
 |
(3.94) |
 in then, according
to the Galilean velocity transform, the light ray moves with velocity
in then, according
to the Galilean velocity transform, the light ray moves with velocity
 in . In other words, the
light ray travels at difference speeds in the two frames of reference. However, this state of affairs is forbidden by Einstein's
first postulate. Hence, we deduce that the Galilean transformation, (3.88)–(3.91), is actually inconsistent with the theory of relativity.
in . In other words, the
light ray travels at difference speeds in the two frames of reference. However, this state of affairs is forbidden by Einstein's
first postulate. Hence, we deduce that the Galilean transformation, (3.88)–(3.91), is actually inconsistent with the theory of relativity.
![\includegraphics[height=2.75in]{Chapter04/galiloo.eps}](img2409.png)