


Next: Angular momentum of a
Up: Angular momentum
Previous: Angular momentum of a
Consider a rigid object rotating about some fixed axis with angular velocity
 .
Let us model this object as a swarm of
.
Let us model this object as a swarm of  particles. Suppose that the
particles. Suppose that the  th particle
has mass
th particle
has mass  , position vector
, position vector  , and velocity
, and velocity  .
Incidentally, it is
assumed that the object's axis of rotation passes through the origin of our
coordinate system. The total angular momentum of the object,
.
Incidentally, it is
assumed that the object's axis of rotation passes through the origin of our
coordinate system. The total angular momentum of the object,  , is simply the
vector sum of the angular momenta of the particles from which it is made up. Hence,
, is simply the
vector sum of the angular momenta of the particles from which it is made up. Hence,
 |
(423) |
Now, for a rigidly rotating object we can write (see Sect. 8.4)
 |
(424) |
Let
 |
(425) |
where  is a unit vector pointing along the object's axis of rotation (in the sense
given by the right-hand grip rule).
It follows that
is a unit vector pointing along the object's axis of rotation (in the sense
given by the right-hand grip rule).
It follows that
 |
(426) |
Let us calculate the component of along the object's rotation axis--i.e.,
the component along the axis. We can write
 |
(427) |
However, since
 ,
the above expression can be rewritten
,
the above expression can be rewritten
 |
(428) |
Now,
 |
(429) |
where  is the moment of inertia of the object about the axis.
(see Sect. 8.6). Hence, it follows that
is the moment of inertia of the object about the axis.
(see Sect. 8.6). Hence, it follows that
 |
(430) |
According to the above formula, the component of a rigid body's angular
momentum vector along its axis of rotation is simply the product
of the body's moment of inertia about this axis and the body's angular velocity.
Does this result imply that we can automatically write
 |
(431) |
Unfortunately, in general, the answer to the above question is no! This
conclusion follows because the
body may possess non-zero angular momentum components about axes perpendicular to
its axis of rotation. Thus, in general, the angular momentum vector of a rotating body
is not parallel to its angular velocity vector. This is a major difference from
translational motion, where linear momentum is always found to be parallel
to linear velocity.
For a rigid object rotating with angular velocity
 ,
,  ,
,
 , we can write the object's angular momentum
, we can write the object's angular momentum
 ,
,  ,
,
 in the form
in the form
where  is the moment of inertia of the object about the
is the moment of inertia of the object about the  -axis, etc. Here, it is
again assumed that the origin of our coordinate system lies on the object's
axis of rotation. Note that the above equations are only valid when the -,
-axis, etc. Here, it is
again assumed that the origin of our coordinate system lies on the object's
axis of rotation. Note that the above equations are only valid when the -,  -, and
-, and
 -axes are aligned in a certain very special manner--in fact, they must be aligned along the
so-called principal axes of the object (these axes invariably coincide with the object's
main symmetry axes). Note that it is always possible to find three, mutually perpendicular,
principal axes of rotation which pass through a given point in a rigid body.
Reconstructing from its components, we obtain
-axes are aligned in a certain very special manner--in fact, they must be aligned along the
so-called principal axes of the object (these axes invariably coincide with the object's
main symmetry axes). Note that it is always possible to find three, mutually perpendicular,
principal axes of rotation which pass through a given point in a rigid body.
Reconstructing from its components, we obtain
 |
(435) |
where  is a unit vector pointing along the -axis, etc.
It is clear, from the above equation, that the reason is not generally parallel
to
is because the moments of inertia of a rigid object about
its different
possible axes of rotation are not generally the same. In other words, if
is a unit vector pointing along the -axis, etc.
It is clear, from the above equation, that the reason is not generally parallel
to
is because the moments of inertia of a rigid object about
its different
possible axes of rotation are not generally the same. In other words, if  then
then
 , and the angular momentum and angular velocity vectors
are always parallel. However, if
, and the angular momentum and angular velocity vectors
are always parallel. However, if
 , which is usually the case,
then is not, in general,
parallel to
.
, which is usually the case,
then is not, in general,
parallel to
.
Although Eq. (435) suggests that the angular momentum of a rigid object
is not generally parallel to its angular velocity, this equation also implies that there
are, at least, three special axes of rotation for which this is the case.
Suppose, for instance, that the object rotates about the -axis, so that
 . It follows from Eq. (435) that
. It follows from Eq. (435) that
 |
(436) |
Thus, in this case, the angular momentum vector is parallel to the angular
velocity vector. The same can be said for rotation about the - or - axes.
We conclude that when a rigid object rotates about one of its principal axes
then its angular momentum is parallel to its angular velocity, but not, in general,
otherwise.
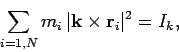
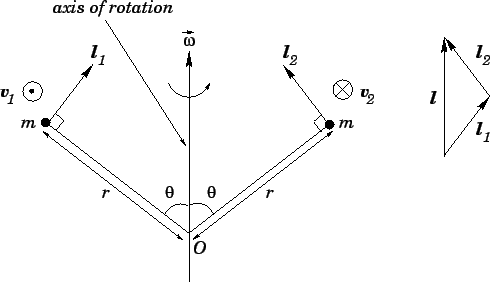
How can we identify a principal axis of a rigid object? At the simplest level,
a principal axis is one about which the object possesses axial symmetry.
The required type of symmetry is illustrated in Fig. 86. Assuming that
the object can be modeled as a swarm of particles--for every
particle of mass  , located a distance
, located a distance  from the origin, and subtending an
angle
from the origin, and subtending an
angle  with the rotation axis, there must be an identical particle located on
diagrammatically the opposite side of the rotation axis. As shown in the diagram,
the angular momentum vectors of such a matched pair of particles can be added together to form
a resultant angular momentum vector which is parallel to the axis of rotation. Thus, if
the object is composed entirely of matched particle pairs then its angular momentum
vector must be parallel to its angular velocity vector. The generalization of this
argument to deal with continuous objects is fairly straightforward. For instance, symmetry implies
that any axis of rotation which passes through the centre of a uniform sphere is
a principal axis of that object. Likewise, a perpendicular axis which passes through the
centre of a uniform disk is a principal axis. Finally, a perpendicular axis which passes
through the centre of a uniform rod is a principal axis.
with the rotation axis, there must be an identical particle located on
diagrammatically the opposite side of the rotation axis. As shown in the diagram,
the angular momentum vectors of such a matched pair of particles can be added together to form
a resultant angular momentum vector which is parallel to the axis of rotation. Thus, if
the object is composed entirely of matched particle pairs then its angular momentum
vector must be parallel to its angular velocity vector. The generalization of this
argument to deal with continuous objects is fairly straightforward. For instance, symmetry implies
that any axis of rotation which passes through the centre of a uniform sphere is
a principal axis of that object. Likewise, a perpendicular axis which passes through the
centre of a uniform disk is a principal axis. Finally, a perpendicular axis which passes
through the centre of a uniform rod is a principal axis.
Figure 86:
A principal axis of rotation.
 |
Next: Angular momentum of a
Up: Angular momentum
Previous: Angular momentum of a
Richard Fitzpatrick
2006-02-02