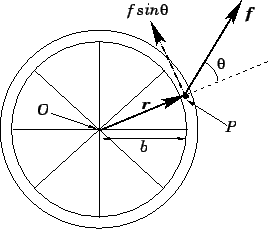
Consider a bicycle wheel of radius ![]() which is free to rotate around a perpendicular
axis passing through its centre. Suppose that we apply a force
which is free to rotate around a perpendicular
axis passing through its centre. Suppose that we apply a force ![]() , which is coplanar with
the wheel, to a
point
, which is coplanar with
the wheel, to a
point ![]() lying on its circumference. See Fig. 79.
What is the wheel's subsequent motion?
lying on its circumference. See Fig. 79.
What is the wheel's subsequent motion?
Let us choose the origin ![]() of our coordinate system to coincide with the pivot
point of the wheel--i.e., the point of intersection between the wheel and the axis
of rotation. Let
of our coordinate system to coincide with the pivot
point of the wheel--i.e., the point of intersection between the wheel and the axis
of rotation. Let ![]() be the position vector of point
be the position vector of point ![]() , and let
, and let ![]() be the angle subtended between the directions of
be the angle subtended between the directions of ![]() and
and
![]() . We can resolve
. We can resolve ![]() into two components--namely, a component
into two components--namely, a component ![]() which acts radially, and a component
which acts radially, and a component ![]() which acts tangentially. The radial
component of
which acts tangentially. The radial
component of ![]() is canceled out by a reaction at the pivot, since the wheel
is assumed to be mounted in such a manner that it can only rotate, and is prevented from
displacing sideways. The tangential component of
is canceled out by a reaction at the pivot, since the wheel
is assumed to be mounted in such a manner that it can only rotate, and is prevented from
displacing sideways. The tangential component of ![]() causes the wheel to
accelerate tangentially. Let
causes the wheel to
accelerate tangentially. Let ![]() be the instantaneous rotation velocity of the wheel's
circumference. Newton's second law of motion, applied to the tangential motion of the
wheel, yields
be the instantaneous rotation velocity of the wheel's
circumference. Newton's second law of motion, applied to the tangential motion of the
wheel, yields
| (360) |
Let us now convert the above expression into a rotational equation
of motion. If ![]() is the instantaneous angular velocity of the wheel, then
the relation between
is the instantaneous angular velocity of the wheel, then
the relation between ![]() and
and ![]() is simply
is simply
| (361) |
| (362) |
Equation (363) is the angular equation of motion of the wheel. It relates the
wheel's angular velocity, ![]() , and moment of inertia,
, and moment of inertia, ![]() , to a quantity,
, to a quantity, ![]() , which is known
as
the torque. Clearly, if
, which is known
as
the torque. Clearly, if ![]() is analogous to mass, and
is analogous to mass, and ![]() is analogous to velocity, then
torque must be analogous to force. In other words, torque is the rotational equivalent of
force.
is analogous to velocity, then
torque must be analogous to force. In other words, torque is the rotational equivalent of
force.
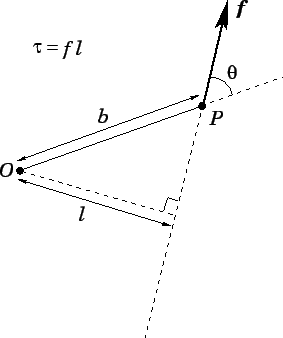
It is clear, from Eq. (364), that a torque is the product of the magnitude
of the applied force, ![]() , and some distance
, and some distance
![]() . The physical interpretation
of
. The physical interpretation
of ![]() is illustrated in Fig. 80. If can be seen that
is illustrated in Fig. 80. If can be seen that ![]() is the
perpendicular distance of the line of action of the force from the axis of rotation.
We usually refer to this distance as the length of the lever arm.
is the
perpendicular distance of the line of action of the force from the axis of rotation.
We usually refer to this distance as the length of the lever arm.
In summary,
a torque measures the propensity of a given force to cause the object upon which
it acts to twist about a certain axis. The torque, ![]() , is simply the product of the magnitude
of the applied force,
, is simply the product of the magnitude
of the applied force, ![]() , and the length of the lever arm,
, and the length of the lever arm, ![]() :
:
Since force is a vector quantity, it stands to reason that torque must also be a vector
quantity. It follows that Eq. (365) defines the magnitude, ![]() , of some torque vector,
, of some torque vector,
![]() .
But, what is the direction of this vector? By convention, if a torque is such as to cause the
object upon which it acts to twist about a certain axis, then the direction of that
torque runs along the direction of the axis in the sense given by the right-hand grip rule.
In other words, if the fingers of the right-hand circulate around the axis of rotation in the sense
in which the torque twists the object, then the thumb of the right-hand
points along the axis in the direction of the torque. It follows that we can rewrite our
rotational equation of motion, Eq. (363), in vector form:
.
But, what is the direction of this vector? By convention, if a torque is such as to cause the
object upon which it acts to twist about a certain axis, then the direction of that
torque runs along the direction of the axis in the sense given by the right-hand grip rule.
In other words, if the fingers of the right-hand circulate around the axis of rotation in the sense
in which the torque twists the object, then the thumb of the right-hand
points along the axis in the direction of the torque. It follows that we can rewrite our
rotational equation of motion, Eq. (363), in vector form:
Although Eq. (366) was derived for the special case of a torque applied to a ring rotating about a perpendicular symmetric axis, it is, nevertheless, completely general.
It is important to appreciate that the directions we ascribe to angular velocities, angular accelerations, and torques are merely conventions. There is actually no physical motion in the direction of the angular velocity vector--in fact, all of the motion is in the plane perpendicular to this vector. Likewise, there is no physical acceleration in the direction of the angular acceleration vector--again, all of the acceleration is in the plane perpendicular to this vector. Finally, no physical forces act in the direction of the torque vector--in fact, all of the forces act in the plane perpendicular to this vector.
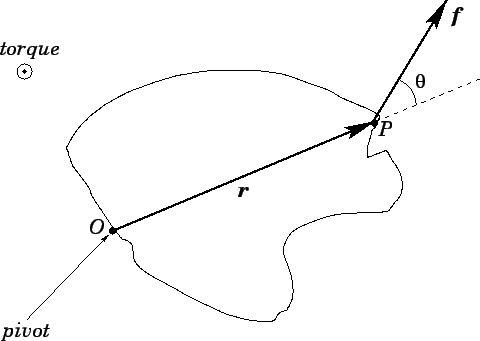
Consider a rigid body which is free to pivot in any direction about some fixed point ![]() .
Suppose that a force
.
Suppose that a force ![]() is applied to the body at some point
is applied to the body at some point ![]() whose position
vector relative to
whose position
vector relative to ![]() is
is ![]() . See Fig. 81.
Let
. See Fig. 81.
Let ![]() be the angle subtended between
the directions of
be the angle subtended between
the directions of ![]() and
and ![]() . What is the vector torque
. What is the vector torque
![]() acting
on the object about an axis passing through the pivot point? The magnitude of this torque is simply
acting
on the object about an axis passing through the pivot point? The magnitude of this torque is simply
| (367) |