Suppose that a moving ball is not spinning at all, and is orientated such that one of its stitches is exposed on one side, whereas the other side is smooth. It follows, from Fig. 11, that the drag force on the smooth side of the ball is greater than that on the stitch side. Hence, the ball experiences a lateral force in the direction of the exposed stitch. Suppose, now, that the ball is rotating slowly as it moves towards the hitter. As the ball moves forward its orientation changes, and the exposed stitch shifts from side to side, giving rise to a lateral force which also shifts from side to side. Of course, if the ball is rotating sufficiently rapidly then the oscillations in the lateral force average out. However, for a slowly rotating ball these oscillations can profoundly affect the ball's trajectory.
Watts and Sawyer23 have
performed wind tunnel measurements of
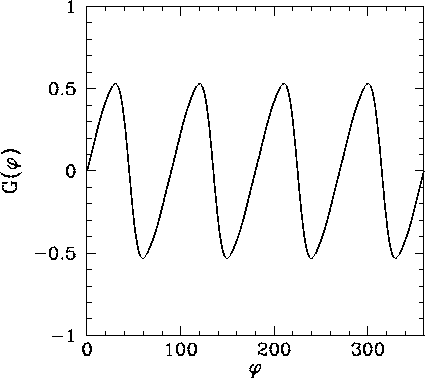
the lateral force acting on a baseball as a function of its angular orientation.
Note that the stitches on a baseball pass any given point four times for each
complete revolution of the ball about an axis passing through its centre.
Hence, we expect the lateral force to exhibit four maxima and four
minima as the ball is rotated once. This is exactly what Watts and Sawyer observed.
For the case of a 65mph knuckleball, Giordano has extracted the following
useful expression for the lateral force, as a function of angular orientation, ![]() ,
from Watts and Sawyer's data:
,
from Watts and Sawyer's data:
![\begin{displaymath}
\frac{f_y}{m\,g} = G(\varphi) = 0.5\left[\sin(4\varphi) - 0....
...arphi) + 0.08\,\sin(12\varphi)-
0.025\,\sin(16\varphi)\right].
\end{displaymath}](img408.png) |
(57) |
Using the above expression, the equations of motion of a knuckleball
can be written as the following set of coupled first-order o.d.e.s:
| (58) | |||
| (59) | |||
| (60) | |||
| (61) | |||
| (62) | |||
| (63) | |||
| (64) |
| (65) | |||
| (66) | |||
| (67) | |||
| (68) | |||
| (69) | |||
| (70) | |||
| (71) |
The above set of equations have been solved numerically using a fixed step-length, fourth-order
Runge-Kutta method. The step-length, h, is conveniently expressed as a fraction of the
pitch's estimated
time-of-flight, ![]() , where
, where
![]() is the horizontal
distance between the pitcher and the hitter. Thus, 1/h is approximately the number
of steps used to integrate the trajectory.
is the horizontal
distance between the pitcher and the hitter. Thus, 1/h is approximately the number
of steps used to integrate the trajectory.
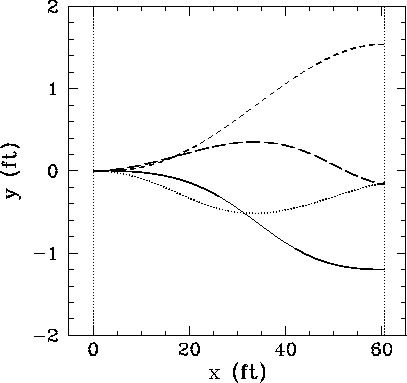 |
Figure 19 shows the lateral displacement of a set of four knuckleballs
thrown with the same rate of spin, ![]() rpm, but starting with different
angular orientations. Note the striking difference between
the various trajectories shown in this figure. Clearly, even a fairly small change in the
initial orientation of the ball translates into a large change in its
subsequent trajectory through the air. For this reason, knuckleballs are extremely
unpredictable--neither the pitcher, the hitter, nor the catcher can be really
sure where one of these pitches is going to end up. Needless to say,
baseball teams always put their best catcher behind the plate when a
knuckleball pitcher is on the mound!
rpm, but starting with different
angular orientations. Note the striking difference between
the various trajectories shown in this figure. Clearly, even a fairly small change in the
initial orientation of the ball translates into a large change in its
subsequent trajectory through the air. For this reason, knuckleballs are extremely
unpredictable--neither the pitcher, the hitter, nor the catcher can be really
sure where one of these pitches is going to end up. Needless to say,
baseball teams always put their best catcher behind the plate when a
knuckleball pitcher is on the mound!
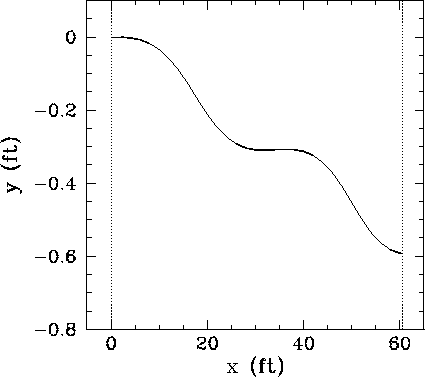 |
Figure 20 shows the lateral displacement of a knuckleball
thrown with a somewhat higher rate of spin than those shown previously: i.e., ![]() rpm.
Note the curious way in which the ball ``dances'' through the air. Given that the
difference between a good hit and a bad hit can correspond to a shift in the strike point
on the bat by as little as
rpm.
Note the curious way in which the ball ``dances'' through the air. Given that the
difference between a good hit and a bad hit can correspond to a shift in the strike point
on the bat by as little as ![]() of an inch, it must be quite a challenge to hit such
a pitch well!
of an inch, it must be quite a challenge to hit such
a pitch well!