


Next: Vector displacement
Up: Motion in 3 dimensions
Previous: Introduction
Our first task, when dealing with 3-dimensional motion, is to set up a suitable
coordinate system. The most straight-forward type of coordinate system is called a Cartesian
system, after René
Descartes. A Cartesian coordinate system consists of three mutually perpendicular axes,
the  -,
-,  -, and
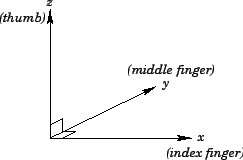
-, and  -axes (say). By convention, the orientation of these
axes is such that when the index finger, the middle finger, and the thumb of the
right-hand are configured so as to be mutually perpendicular, the index finger, the
middle finger, and the thumb can be aligned along the -, -, and -axes, respectively.
Such a coordinate system is termed right-handed. See Fig. 10. The
point of intersection of the three coordinate axes is termed the origin
of the coordinate system.
-axes (say). By convention, the orientation of these
axes is such that when the index finger, the middle finger, and the thumb of the
right-hand are configured so as to be mutually perpendicular, the index finger, the
middle finger, and the thumb can be aligned along the -, -, and -axes, respectively.
Such a coordinate system is termed right-handed. See Fig. 10. The
point of intersection of the three coordinate axes is termed the origin
of the coordinate system.
Figure 10:
A right-handed Cartesian coordinate system
 |
Richard Fitzpatrick
2006-02-02