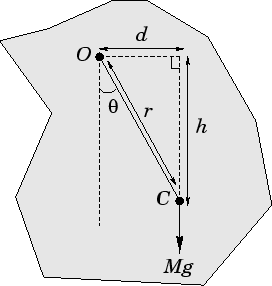
Let ![]() represent the pivot point, and let
represent the pivot point, and let ![]() be the centre of mass of the object. See Fig. 90.
Suppose that
be the centre of mass of the object. See Fig. 90.
Suppose that ![]() represents the distance between points
represents the distance between points ![]() and
and ![]() , whereas
, whereas ![]() is
the angle subtended between the line
is
the angle subtended between the line ![]() and the
downward vertical. There are two external forces acting on the object. First, there is the
downward force,
and the
downward vertical. There are two external forces acting on the object. First, there is the
downward force, ![]() , due to gravity, which acts at the centre of mass. Second, there is
the reaction,
, due to gravity, which acts at the centre of mass. Second, there is
the reaction, ![]() , due to the pivot, which acts at the pivot point. Here,
, due to the pivot, which acts at the pivot point. Here, ![]() is the mass of the object, and
is the mass of the object, and ![]() is the
acceleration due to gravity.
is the
acceleration due to gravity.
Two conditions must be satisfied in order for a given configuration of the
object shown in Fig. 90 to represent
an equilibrium configuration. First, there must be zero net external
force acting on the object. This implies that the reaction, ![]() , is equal and
opposite to the gravitational force,
, is equal and
opposite to the gravitational force, ![]() . In other words, the reaction is of
magnitude
. In other words, the reaction is of
magnitude ![]() and is directed vertically upwards. The second condition
is that there must be zero net torque acting about the pivot point. Now,
the reaction,
and is directed vertically upwards. The second condition
is that there must be zero net torque acting about the pivot point. Now,
the reaction, ![]() , does not generate a torque, since it acts at the pivot point.
Moreover, the torque associated with the gravitational force,
, does not generate a torque, since it acts at the pivot point.
Moreover, the torque associated with the gravitational force, ![]() , is simply the magnitude
of this force times the length of the lever arm,
, is simply the magnitude
of this force times the length of the lever arm, ![]() (see Fig. 90). Hence, the net torque
acting on the system about the pivot point is
(see Fig. 90). Hence, the net torque
acting on the system about the pivot point is
| (468) |
Incidentally, we can use the above result to experimentally determine the centre of mass of a given laminar object. We would need to suspend the object from two different pivot points, successively. In each equilibrium configuration, we would mark a line running vertically downward from the pivot point, using a plumb-line. The crossing point of these two lines would indicate the position of the centre of mass.
Our discussion of the equilibrium configuration of the laminar object
shown in Fig. 90 is not quite complete. We have determined that the
condition which must be satisfied by an equilibrium state is ![]() .
However, there are, in fact, two
physical roots
of this equation. The first,
.
However, there are, in fact, two
physical roots
of this equation. The first,
![]() , corresponds to the case
where the centre of mass of the object is aligned vertically below the
pivot point. The second,
, corresponds to the case
where the centre of mass of the object is aligned vertically below the
pivot point. The second,
![]() , corresponds to the
case where the centre of mass is aligned vertically above the
pivot point. Of course, the former root is far more important than the latter, since the
former root corresponds to a stable equilibrium, whereas the latter
corresponds to an unstable equilibrium. We recall, from Sect. 5.7, that
when a system is slightly disturbed from a stable equilibrium then the
forces and torques which act upon it tend to return it to this equilibrium, and
vice versa for an unstable equilibrium. The easiest way to distinguish between
stable and unstable equilibria, in the present case, is to evaluate the gravitational
potential energy of the system. The potential energy of the object shown
in Fig. 90, calculated using the height of the pivot as the reference height,
is simply
, corresponds to the
case where the centre of mass is aligned vertically above the
pivot point. Of course, the former root is far more important than the latter, since the
former root corresponds to a stable equilibrium, whereas the latter
corresponds to an unstable equilibrium. We recall, from Sect. 5.7, that
when a system is slightly disturbed from a stable equilibrium then the
forces and torques which act upon it tend to return it to this equilibrium, and
vice versa for an unstable equilibrium. The easiest way to distinguish between
stable and unstable equilibria, in the present case, is to evaluate the gravitational
potential energy of the system. The potential energy of the object shown
in Fig. 90, calculated using the height of the pivot as the reference height,
is simply
| (469) |