


Next: Coordinate Transformations
Up: Vector Algebra and Vector
Previous: Vector Algebra
Consider a Cartesian coordinate system  consisting of
an origin,
consisting of
an origin,  , and three mutually perpendicular coordinate axes,
, and three mutually perpendicular coordinate axes,  ,
,  , and
, and
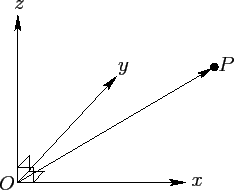
 --see Figure A.99. Such a system is said to be right-handed if, when looking along the direction, a
--see Figure A.99. Such a system is said to be right-handed if, when looking along the direction, a  clockwise
rotation about is required to take into . Otherwise, it is said to be left-handed. In physics, it is conventional to always use right-handed coordinate systems.
clockwise
rotation about is required to take into . Otherwise, it is said to be left-handed. In physics, it is conventional to always use right-handed coordinate systems.
Figure A.99:
A right-handed Cartesian coordinate system.
 |
It is convenient to define unit vectors,  ,
,  , and
, and  , parallel to , , and , respectively.
Incidentally, a unit vector is a vector whose magnitude is unity. The position vector,
, parallel to , , and , respectively.
Incidentally, a unit vector is a vector whose magnitude is unity. The position vector,  , of some general point
, of some general point  whose Cartesian coordinates
are (
whose Cartesian coordinates
are ( ,
,  ,
,  ) is then given by
) is then given by
 |
(1271) |
In other words, we can get from to by moving a distance parallel to , then a distance
parallel to , and then a distance parallel to . Similarly, if  is an arbitrary vector then
is an arbitrary vector then
 |
(1272) |
where  ,
,  , and
, and  are termed the Cartesian components of . It is coventional to write
are termed the Cartesian components of . It is coventional to write
 .
It follows that
.
It follows that
 ,
,
 , and
, and
 . Of course,
. Of course,
 .
.
According to the three-dimensional generalization of the Pythagorean theorem, the distance
 is
given by
is
given by
 |
(1273) |
By analogy, the magnitude of a general vector takes the form
 |
(1274) |
If
and
 then it is
easily demonstrated that
then it is
easily demonstrated that
 |
(1275) |
Furthermore, if  is a scalar then it is apparent that
is a scalar then it is apparent that
 |
(1276) |
Next: Coordinate Transformations
Up: Vector Algebra and Vector
Previous: Vector Algebra
Richard Fitzpatrick
2011-03-31