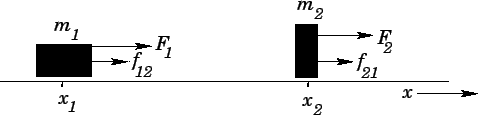
Applying Newton's second law of motion to each object in turn, we obtain
At this point, it is helpful to introduce the concept of the centre of mass.
The centre of mass is an imaginary point whose displacement ![]() is defined to be
the mass weighted average
of the displacements of the two objects which constitute the system. In
other words,
is defined to be
the mass weighted average
of the displacements of the two objects which constitute the system. In
other words,
Summing Eqs. (181) and (182), and then making use of Eqs. (180) and (183),
we obtain
| (184) |
Suppose that there are no external forces acting on the system (i.e., ![]() ), or,
equivalently, suppose
that the sum of all the external forces is zero (i.e.,
), or,
equivalently, suppose
that the sum of all the external forces is zero (i.e., ![]() ).
In this case, according to Eq. (185), the motion of the centre of mass is governed by
Newton's first law of motion: i.e., it consists of uniform motion in a straight-line.
Hence, in the absence of a net external force, the motion of the centre of mass is
almost certainly far simpler than that of the component masses.
).
In this case, according to Eq. (185), the motion of the centre of mass is governed by
Newton's first law of motion: i.e., it consists of uniform motion in a straight-line.
Hence, in the absence of a net external force, the motion of the centre of mass is
almost certainly far simpler than that of the component masses.
Now, the velocity
of the centre of mass is written
| (186) |
| (187) |
| (188) |
| (189) |
Let us now try to apply some of the concepts discussed above.
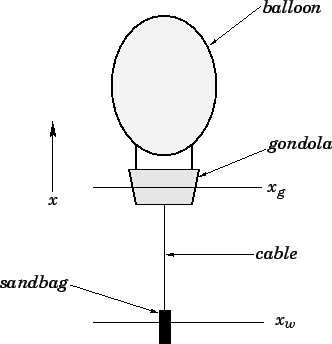
Consider the simple two-component system shown in Fig. 46. A
gondola of mass ![]() hangs from a hot-air balloon whose mass
is negligible compared to that of the gondola. A sandbag of mass
hangs from a hot-air balloon whose mass
is negligible compared to that of the gondola. A sandbag of mass ![]() is
suspended from the gondola by means of a light inextensible cable. The system
is in equilibrium.
Suppose, for the sake of consistency with our other examples, that the
is
suspended from the gondola by means of a light inextensible cable. The system
is in equilibrium.
Suppose, for the sake of consistency with our other examples, that the
![]() -axis runs vertically upwards.
Let
-axis runs vertically upwards.
Let ![]() be the height of the gondola, and
be the height of the gondola, and ![]() the height of the
sandbag. Suppose that the upper end of the cable is attached to a winch inside the gondola, and
that this winch is used to slowly shorten the cable, so that the sandbag is lifted upwards
a distance
the height of the
sandbag. Suppose that the upper end of the cable is attached to a winch inside the gondola, and
that this winch is used to slowly shorten the cable, so that the sandbag is lifted upwards
a distance
![]() . The question is this: does the height of the gondola
also change as the cable is reeled in? If so, by how much?
. The question is this: does the height of the gondola
also change as the cable is reeled in? If so, by how much?
Let us identify all of the forces acting on the system shown in Fig. 46. The internal forces are
the upward force exerted by the gondola on the sandbag, and the downward force exerted by the
sandbag on the gondola. These forces are transmitted via the cable, and
are equal and opposite (by Newton's third law of motion). The external forces are the
net downward force due to the combined weight of the gondola and the sandbag, and the
upward force due to the buoyancy of the balloon. Since the system is
in equilibrium, these forces are equal and opposite (it is assumed that the cable is reeled in
sufficiently slowly that the equilibrium is not upset). Hence, there is zero
net external force acting on the system. It follows, from the previous discussion, that the
centre of mass of the system is subject to Newton's first law. In particular, since the
centre of mass is clearly stationary before the winch is turned on, it must remain
stationary both during and after the period in which the
winch is operated. Hence, the height of the centre of mass,
| (190) |
Suppose that the operation of the winch causes the height of the sandbag to change
by
![]() , and that of the gondola to simultaneously change by
, and that of the gondola to simultaneously change by
![]() . If
. If
![]() is a conserved quantity, then we must have
is a conserved quantity, then we must have
| (191) |
| (192) |
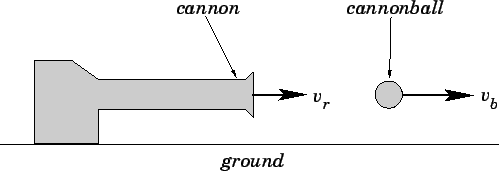
Our next example is pictured in Fig. 47. Suppose that a cannon of mass ![]() propels a cannonball
of mass
propels a cannonball
of mass ![]() horizontally with velocity
horizontally with velocity ![]() . What is the recoil velocity
. What is the recoil velocity ![]() of the cannon? Let us
first identify all of the forces acting on the system. The internal forces are
the force exerted by the cannon on the cannonball, as the cannon is fired, and the
equal and opposite force exerted by the cannonball on the cannon. These forces are
extremely large, but only last for a short instance in time: in physics, we call these
impulsive forces.
There are no external forces acting
in the horizontal direction (which is the only direction that we are considering in this
example).
It follows that the total (horizontal) momentum
of the cannon? Let us
first identify all of the forces acting on the system. The internal forces are
the force exerted by the cannon on the cannonball, as the cannon is fired, and the
equal and opposite force exerted by the cannonball on the cannon. These forces are
extremely large, but only last for a short instance in time: in physics, we call these
impulsive forces.
There are no external forces acting
in the horizontal direction (which is the only direction that we are considering in this
example).
It follows that the total (horizontal) momentum ![]() of the system is a
conserved quantity. Prior to the firing of the cannon, the total momentum is zero (since
momentum is mass times velocity, and nothing is initially moving). After the cannon is
fired, the total momentum of the system takes the form
of the system is a
conserved quantity. Prior to the firing of the cannon, the total momentum is zero (since
momentum is mass times velocity, and nothing is initially moving). After the cannon is
fired, the total momentum of the system takes the form
| (193) |
| (194) |